Dunia robotika kembali diguncang oleh sebuah terobosan yang lahir dari Universitas Duke. Berbeda dengan tren yang lazim mengadopsi bentuk menyerupai manusia, hewan, atau serangga, tim insinyur yang dipimpin oleh Profesor Boyuan Chen telah berhasil menciptakan sebuah prototipe robot yang tampil beda, diberi nama Argus. Pemberian nama ini terinspirasi dari sosok raksasa bermata banyak dalam mitologi Yunani, sebuah metafora yang sangat tepat untuk menggambarkan kemampuan visual dan mobilitas robot ini.
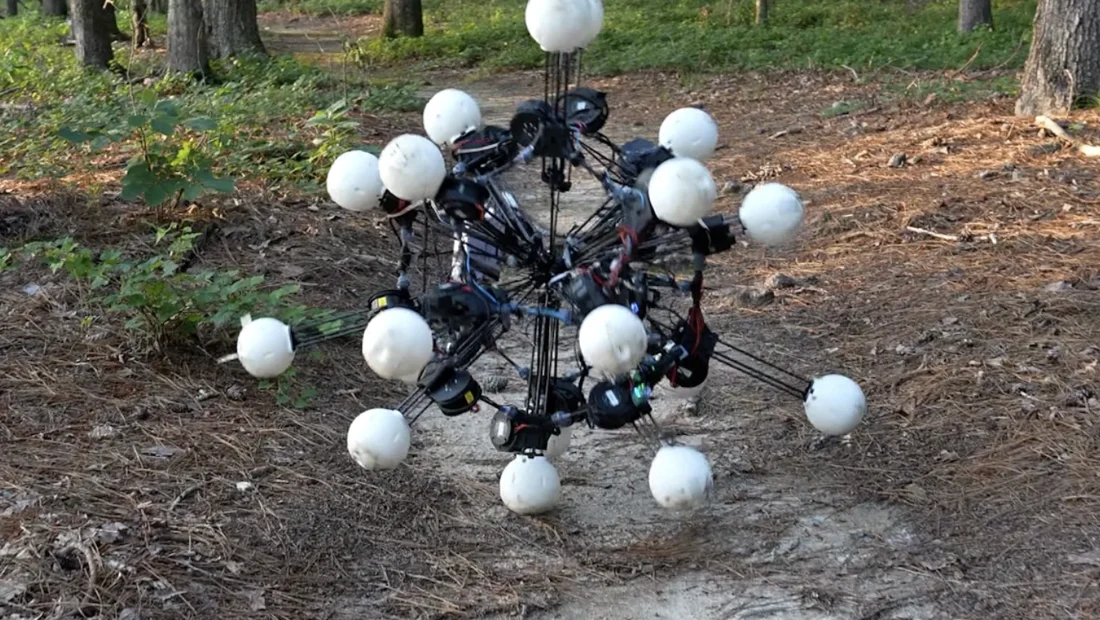
Argus bukanlah robot konvensional. Desainnya yang bulat, tanpa orientasi depan, belakang, atas, maupun bawah yang jelas, menjadi kunci utama kemampuannya yang revolusioner. Robot ini dilengkapi dengan dua puluh kaki teleskopik yang memancar dari inti pusatnya. Setiap kaki ini dipasangi sensor kedalaman, memungkinkan Argus untuk ‘melihat’ dan bergerak ke segala arah secara simultan dan instan. Konsep ini secara fundamental mengubah cara pandang terhadap desain robot yang selama ini cenderung berorientasi pada bentuk yang familiar.
Profesor Chen menekankan bahwa efektivitas robot dalam memberikan bantuan tidak selalu harus terikat pada kemiripan bentuknya dengan makhluk hidup. Beliau berargumen, "Alih-alih mengukur seberapa terstruktur kaki Anda dalam berbagai bagian tubuh yang berbeda, kami mengukur seberapa cepat Anda dapat bergerak ke segala arah. Siapa yang bilang, kalau kita memiliki robot untuk membantu kita dengan cara paling efektif, wujudnya harus terlihat seperti kita?" Pernyataan ini membuka cakrawala baru dalam perancangan robot yang mengutamakan fungsionalitas dan adaptabilitas di atas estetika konvensional.
Pengujian yang dilakukan terhadap Argus menunjukkan kemampuan luar biasa dalam berbagai medan yang menantang. Robot ini terbukti mampu menavigasi dengan lincah di pesisir pantai yang berpasir halus maupun di tengah rimbunnya semak belukar di hutan. Kemampuannya untuk berguling melewati rintangan, menstabilkan diri setelah menerima dorongan, bahkan memanjat di antara dinding bata dengan mengombinasikan gerakan menopang dan mendorong, membuktikan ketangguhan desainnya. Lebih lanjut, Argus dirancang agar tetap dapat berfungsi meskipun satu atau beberapa motor penggeraknya mengalami kerusakan atau salah satu kakinya patah. Ketahanan dan fleksibilitas ini menjadi nilai tambah yang signifikan.
Jiaxun Liu, seorang mahasiswa pascasarjana yang turut terlibat dalam penelitian ini, mengungkapkan kekagumannya terhadap pergerakan Argus yang sangat berbeda dari robot-robot lain yang pernah ia tangani. Ia menambahkan, "Pertama kali kami melihatnya menavigasi di antara pepohonan dan medan yang kasar, bahkan saat mengalami benturan keras, kami tahu bahwa robot ini adalah sesuatu yang berbeda." Pengalaman langsung ini menggarisbawahi betapa Argus mewakili lompatan kuantum dalam teknologi robotika.
Sebagai bagian integral dari penelitian ini, para ahli mengembangkan sebuah prinsip desain baru yang mereka sebut "isotropi dinamis". Prinsip ini bertujuan untuk menilai robot berdasarkan seberapa seragam kemampuan akselerasinya ke segala arah, dengan skala penilaian dari 0 hingga 1. Mayoritas robot yang ada saat ini, termasuk robot humanoid yang menyerupai manusia dan drone yang akrab di udara, berada di bawah skor 0,6. Argus, dengan skor impresif 0,91, menunjukkan keunggulan yang signifikan dalam hal ini.
Profesor Chen menjelaskan bahwa ketika sebuah robot mampu berakselerasi dengan baik ke semua arah, ia tidak lagi terbatasi oleh keharusan untuk menghadap dunia dengan cara tertentu. Kemampuan ini membuka potensi aplikasi yang sangat luas. Ia berharap prinsip isotropi dinamis ini kelak dapat menjadi panduan dalam pengembangan robot untuk berbagai keperluan krusial, seperti robot pencari dan penyelamat (SAR) yang membutuhkan mobilitas tinggi di medan yang sulit, kendaraan bawah air atau udara yang beroperasi di lingkungan ekstrem, hingga robot industri yang mampu memanipulasi objek dengan presisi dari berbagai sudut.
Lebih jauh lagi, Chen mengemukakan gagasan inovatif terkait manipulasinya. Alih-alih menciptakan tangan robot yang meniru bentuk tangan manusia, ia membayangkan Argus itu sendiri dapat bertransformasi menjadi sebuah ‘tangan’ yang mampu memanipulasi objek dari segala arah. Konsep ini menggarisbawahi fleksibilitas dan potensi Argus untuk menjadi platform multifungsi yang dapat beradaptasi dengan berbagai tugas dan lingkungan. Argus bukan sekadar robot, melainkan sebuah visi baru tentang bagaimana robot dapat berinteraksi dan memberikan kontribusi yang lebih efektif di dunia nyata.
This article was rewritten using AI technology based on information from inet.detik.com without altering the facts of the original article.




